Auf dieser Homepage möchte ich meine Erfahrungen mit dem EP Concept SR und Infos, die mich erreichen, gesammelt veröffentlichen. Wenn mir also jemand Tips und Hinweise zum Thema Heli oder spezielle Erkenntnisse zum EP Concept SR mitteilt, werde ich sie hier veröffentlichen.
Seit ca. 2 Jahren (Frühjahr ‘98) beschäftige ich mich
mit Modellbau. Angefangen habe ich mit dem SkyFlex und
Elektroseglern. Als ich im Herbst die Homepage von Kurt gelesen habe, stand für
mich fest: "Das möchte ich auch versuchen".
Da ich mich beruflich mit Softwareentwicklung beschäftige und
auch in meiner Freizeit oft am PC sitze, habe ich mit dem
Simulatorprogramm FMS erste virtuelle Flugversuche durchgeführt.
Ich habe das Demo von AeroFly gesehen und war voll begeistert -
"Muß ich haben!" Ende November ‘99 war es dann
soweit. Nachdem ich meine Fernsteuerung am PC angeschlossen und
als Modell den ECO8 gewählt hatte, war meine Verwunderung groß.
Ich konnte den Hubi kaum 15s in der Luft halten - also eine echte
Herausforderung. Seitdem trainiere ich fast täglich ca. 30min am
Simulator.
Als ich dann kurz vor Weihnachten ‘99 ein günstiges Angebot
für einen gebrauchten (flugfertigen) EP Concept SR im Netz fand,
konnte ich nicht widerstehen, und habe mir das Teil gekauft.
Nun habe ich versucht, möglichst viele Informationen zu
sammeln (siehe Links). Wie bei Kurt beschrieben, habe ich für
die ersten Hüpfer einen Hula-Hoop Reifen (d=60...80cm) mit 2
Kiefernholzleisten 10x5mm und Kabelbindern am Heli befestigt.
Zusätzlich habe ich an einer großen Fußbodenplatte (1.5x1.5m)
4 Schnüre und 4 Gummiringe (stabil!) befestigt. Von nur einer
Schnur würde ich abraten. Es sollten mind. 3 Schnüre sein. Bei
4 Schnüren im Quadrat (a=60cm Abstand und Länge ca. 25cm,
später immer etwas länger werden) richtet sich die Nase des
Helis, wenn er in die "Seile" geht, automatisch wieder
gerade. Damit der Heli nicht so hart in die Seile geht, verwende
ich jetzt zusätzlich 25cm lange "Schlüpfergummi", mit
denen ich meine (für mich nun schon zu "kurz"
gewordenen) Schnüre verlängert habe (oder besser, keine Stricke
sondern nur Schlüpfergummi nehmen). Das ganze
Experiment führe ich auf meinem Dachboden durch, so daß ich
unabhängig vom Wetter/Tageslicht üben kann. Da das gesamte
Trainingsgestell ca. 200g wiegt, ist es günstig ohne Akku (wird
sonst zu schwer für kleinen E-Heli mit Hula-Hoop Reifen),
sondern mittels Trainingskabel, Autoakku und einem
Äquivalenzgewicht (ich verwende 8/AR500) zu fliegen/hüpfen.
Nach 10min sollte eine Pause zum Abkühlen des Motors eingelegt
werden.
Bei mir hat sich diese Methode bisher bestens bewährt. Man kann
so die Einstellungen des Hubis vornehmen und verbessern, den
Umgang mit dem Heli üben und die Programmierung der
Fernsteuerung erlernen.
Das Jahr 2000
Es war zwar kein richtiger Winter, aber Flugwetter wollte auch
nicht aufkommen. Deshalb habe ich mich entschlossen, meine mc-16
zur Reparatur/Wartung zum Hersteller zu schicken. Somit konnte
ich die nächsten 3 1/2 Wochen nicht üben. Ende Februar war das
Teil wieder zurück. Nun konnte ich wieder etwas am Simulator
trainieren und einen ersten Freilufttest in meinem Hof/Garten
probieren. Da wenig freier Platz vorhanden ist (ca. 7m x7m), habe
ich den Heli mit zwei ca. 1.5m langen Gummibändern vorn v-förmig
befestigt. Als Stromquelle verwendete ich einen Autoakku und ich
hatte mein Trainingsgestell (Reifen) untergeschnallt. Die ganze
Übung ging recht gut und ich hatte den Heli stets unter
Kontrolle. Da das Wetter immer noch nicht besser wurde, konnte
ich diese Übung erst einige Wochen später (Ende März) erneut
durchführen. Dabei nutzte ich 10min Flugzeit und 10min Pause (für
mich und den Heli). Als nächstes habe ich (Anfang April) mit dem
Seitenschweben begonnen (erst 45°, später 90°). Zusätzlich
habe ich meinen Standort zum Heli variiert. Für meine weiteren
Übungen habe ich den Reifen durch ein Holzkreuz mit Styrokugeln
ersetzt.
Der nächste Schritt, nachdem ich mit dem Heli das Schweben (Rücken-
und Seitenschweben) erlernt hatte, ist nun (Juni '00) das Üben
von "kleinen" Rundflügen und Nasenschweben. Da fliege
ich gestreckte Achten (30m x 10m) und muß den Heli auch mal
seitlich driften lassen, um ihn zurück zu holen, aber es wird
immer besser.
Der von mir seit Sommer berechnete
und eingesetzte Antrieb mit Regler hat sich vorerst bewährt..
Seit Mitte Oktober war ich nur sehr selten noch mit dem Heli
unterwegs, da ich aus beruflichen Gründen entweder keine Zeit
hatte oder das Wetter es nicht ermöglichte.
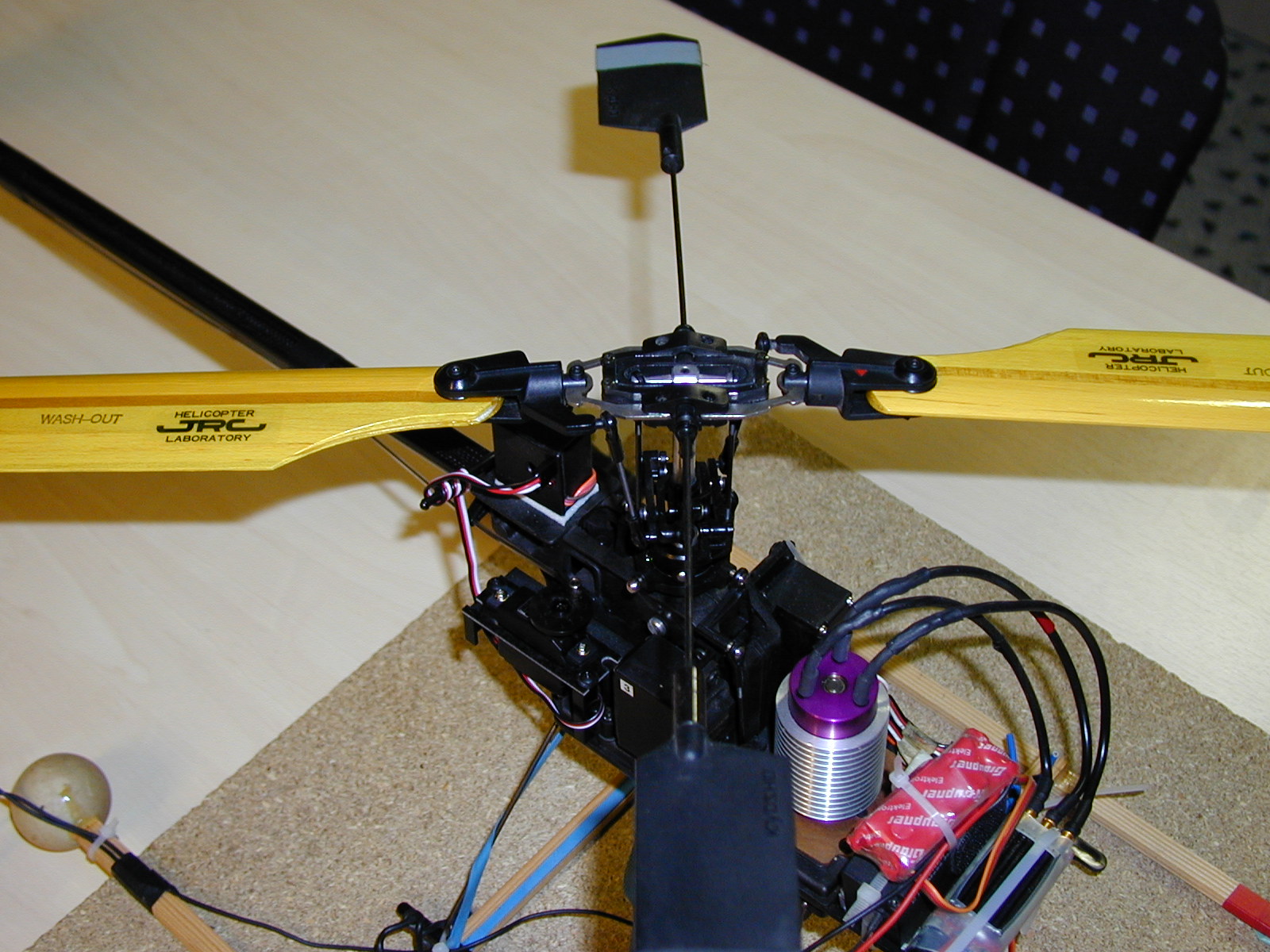
Ich habe nun begonnen weitere Verbesserungen/Untersuchungen am System durchzuführen. Seit Weihnachten 2000 besitze ich zwei Paar JRC washout Rotorblätter aus Japan [1.1.6]. Da mein EP deutlich Übergewicht hatte, habe ich nun einige Baugruppen gegen leichte Baugruppen getauscht. Zusätzlich werde ich das externe BEC (Schaltregler) von Titus Jäger testen.
Die Styrokugeln sollte man mit roter Farbe lackieren, da die
Lageerkennung und das Rutschen verbessert werden.
Ein Trainingskabel kann man aus 6...8m Lautsprecherkabel 1.5...2.5mm²
bauen (der Leistungsabfall über das Kabel ist gewollt [12V]!).
Wenn man mittels Trainingskabel am Autoakku fliegt, sollte ein
Flugakku oder ein entsprechendes Äquivalenzgewicht verwendet
werden, das dem späteren Flugzustand nahekommt.
Da eine Trainingsplattform sicher zu teuer ist, kann man sich zum
Einstellen/Experimentieren des Gyro/Heck mit einem alten
Plattenspieler weiterhelfen. Man könnte auch versuchen eine
Trainingsplattform aus einem alten Standfuß eines Monitors zu
bauen, oder das Kugelgelenk eines Deo roll on zu verwenden. Wer
das mal versucht oder eine andere Idee hat, kann sich ja mal bei
mir melden.
Für Anfänger ist es günstiger, wenn die Steuerung nicht so
direkt ist. Dies kann man durch Erhöhung der Gewichte an den
Paddelstangen erreichen. In [1] wurde das
Zubehörteil EH-4A (7g) vorgestellt (das Originalteil EH-4 wiegt
3.5g und das Tuningteil EH-70 aus Alu wiegt 1g). Da das Teil EH-4A
nicht lieferbar und zu teuer ist, habe ich auf das Ende jeder
Paddelstange zwei Stellringe d=3mm als Zusatzgewichte montiert.
Ich verwende etwas (20%) Expo für Roll und Nick. Da mein Heck
sehr "aggressiv" reagiert, habe ich 40% Expo
eingestellt (in der Literatur wird zwar von Expo abgeraten, ich
habe damit aber bisher gute Erfahrungen gemacht).
Auf der Suche nach Hilfsmitteln zum Helifliegenlernen, kam mir
der Gedanke, einen Autopiloten einzusetzen. Da ich so ein Teil
nicht besitze, habe ich erst mal die NGs und Foren befragt. Dabei
wurden mir folgende Informationen mitgeteilt: Der Autopilot HAL
2100 arbeitet mit einer optischen Horizonterkennung (Hell-Dunkelgrenze
wird mit 4 um 90° versetzt angeordneten Sensoren erkannt). Das
bedeutet, daß er erst in einer bestimmten Höhe wirksam wird.
Ungünstige Geländegegebenheiten können zusätzlich die Wirkung
beeinträchtigen. Natürlich kann man den HAL 2100 nicht im
Wohnzimmer verwenden! In bestimmten Fällen kann der HAL 2100 zu
einer Verringerung der Reichweite führen.
Die Firma http://www.flyware.de/Autopilot/autopilot.html stellt
"vielleicht/möglicherweise" auch einen Autopiloten her.
Angeblich werden sogar Testpiloten für das Teil gesucht. Ich
kenne aber keinen, und meine Anfrage bei der Firma verlief im
Sand- D a n k e ! ! ! :-( Deshalb kann ich keine Aussage treffen,
mit welchem Wirkprinzip gearbeitet wird.
Die Schwerkraft (Prinzip Pendel, Wasserwaage) läßt sich
aufgrund der auftretenden Beschleunigungskräfte nicht oder nur
schlecht einsetzen. Da macht es mehr Sinn, Drehratensensoren (Kreisel)
oder Piezoelemente einzusetzen, die zusätzlich mit "Heading
Hold" und Empfindlichkeitseinstellung über einen
Fernsteuerkanal regelbar sind. Aber auch hier gilt, daß die
Anwendung nur in einer gewissen Höhe Sinn macht, um das Modell
aus einer unkontrollierbaren Fluglage in die Waagerechte zu
bringen. Ein Autopilot kann nicht als Landehilfe für Helis
verwendet werden, da der Hubschrauber, selbst wenn er waagerecht
steht, eine horizontale Bewegung ausführen kann (Modell bewegt
sich mit Windgeschwindigkeit und würde beim Aufsetzen umkippen).
Um diese Bewegung zu erkennen, wären zusätzliche Sensoren
notwendig.
Bei einem Crash gehen meist Original- Rotorblätter und das
Heckrohr kaputt. Die Holzblätter EH-83 können zwar etwas mehr
aushalten, zerstören bei einem Crash aber auch deutlich mehr!
Deshalb verwende ich (als Anfänger) vorerst die
Styroschaumblätter (Sollbruchstelle). Später kann ich immer
noch EH-83 verwenden. Weiterhin gibt es bei der Firma Fleischmann
Alu-Blades ([6] [7]), bei
JV-Modellbau Ulm [8] GFK Blätter und bei MS-Composite
CFK-Blätter [9]. Auf den japanischen Seiten
werden JRC washout Blätter vorgestellt, mit denen verbesserte
Flugzeiten möglich sind. Für die ersten
Tests habe ich ein Paar JRC washout (die
Blätter sind ca. 2cm länger als die Originalblätter) etwas
gekürzt (ca. 1cm), da der Abstand zum Heckrotor sehr knapp war.
Bei den ersten Flugtests mußte ich feststellen, daß diese
Blätter einen deutlich größeren Pitchwinkel(>10°) und
etwas mehr Drehzahl(1450 min-1) zum Schweben benötigen (gegenüber
EH-83 oder den GFK aus Ulm). Längere Flugzeiten konnte ich bei
meinen ersten Tests leider noch nicht feststellen!
Wenn man andere (schwerere) Rotorblätter verwendet,
sollten die Lager EH-9 durch Drucklager (außen10mm und innen 4mm,
die die axiale Belastung aufnehmen können) wie sie z.B. von der
Firma Vario angeboten werden, getauscht werden.
Das originale Heckrohr aus Alu kostet 27DM und das aus Carbon EH-71
ca. 80DM. Ich habe aber das Teil (neue Ersatzteilnummer) Z1002
von meinem Händler [11] erhalten. Man kann
sich natürlich auch 1m Rohmaterial (d[i]=14mm / 0.5mm
Wandstärke reicht für zwei Stück) besorgen, und das Heckrohr
selber fertigen. Der Vorteil ist, daß man ein Carbon- Heckrohr
wieder reparieren kann (Gewebe + Harz). Ein leicht defektes Alu-
Rohr kann mit einem 13mm Rundstab gerichtet (durchschieben)
werden.
Eine sehr preiswerte Alternative sind 15mm PVC-
Installationsrohre.
Das Hauptproblem beim Concept ist die geringe Flugzeit (4 ...
5 min mit 8 Zellen) und die starke Erwärmung des Bürstenmotors.
Etwas Abhilfe schafft der Einsatz von 10 Zellen (Achtung Probleme
mit BEC), dem Originalmotor und einem 13er Ritzel. Meine
Untersuchungen/Recherchen/Berechnungen haben ergeben, daß mit 10
Zellen und einem bürstenlosen Motor (z.B. B40 12L) oder einem
"edlen" Bürstenmotor (z.B. Pletti HP 200/25) die
günstigsten Flugzeiten erreichbar sind (über 10 min Knut
Schasse).
Überschlagsrechnung
Vielen Dank an die Hersteller Schulze und Hacker, die mir bei der
Dimensionierung eines optilmalen Antriebes zur Seite standen.
Mein besonderen Dank möchte ich hier nochmals an Rainer Hacker
für die geleistete Zusammenarbeit richten!
Achtung für die Regler von Schulze Future 45 ergeben sich mit
den Hacker Motoren bis zu 10% höhere Drehzahlen gegenüber den
Kontronik Reglern (Kontronik kommutiert auf mehr Drehmoment)!
geg:
Lastdrehzahl = Leerlaufdrehzahl*0.85 (Rainer Hacker)
gewünschte Rotordrehzahl 1350 min-1 (meine Vorgabe)
Untersetzung 18:1 für 16er Ritzel (Originalübersetzung)
Regler ist nicht voll durchgesteuert (Heli Mode), Motor bei ca.
85% Vollast (Reserve)
ges:
Leerlaufdrehzahl pro Volt
Lösung:
1350min-1 x 18 = 24300 min-1 (Motor unter Last bei ca. 85% der
Leerlaufdrehzahl)
d.h. ca. 28000 / 0,85..0.9 (Reserve) => 33000 U / min Leerlauf!
bei 10 Zellen und ca. 12Volt --> 2700 U/V
Antwort:
Die Leerlaufdrehzahl sollte bei 10 Zellen min. 2700 U/V (2500 U/V
für Schulze Future 45ho) betragen.
Mit passender Untersetzung oder anderer Zellenzahl kann auch eine
Anpassung an andere Motorkennwerte erfolgen. Bei der Motorauswahl
ist darauf zu achten, daß der Motor einen hohen Wirkungsgrad bei
den gewünschten Parametern (Arbeitsstrom und Zellenzahl) besitzt:
-z.B. elektrischer Input 150W=10V*15A bei 80% Wirkungsgrad sind
120W auf der Welle [der EP Concept benötigt zum Schweben 110...120W
am Rotor]
Mögliche Varianten für Bürstenlose mit Leerlaufdrehzahl ca.
2500 U/V bis 3000U/V:
| Klasse bis 150g | Klasse bis 125g sind aber zu klein für den EP Concept (z.B. LMH 110) |
| Hacker B40 12L mit 2500 U/V | Hacker B40 16S |
| Kontronik BL480/33 mit passender Übersetzung oder anderer Zellenzahl | Kontronik BL400/29 oder BL400/40 mit passender Übersetzung oder anderer Zellenzahl |
| Lehner 1525 16Wdg | Lehner 1520 16 Wdg |
Ein weiterer Punkt zur Flugzeitverlängerung ist die
Gewichtsreduktion. Das Abfluggewicht sollte 1450g (8 Zellen)
nicht überschreiten. Ich habe auch einige Untersuchungen zum
Thema Masse/Flugzeit unternommen und den Strom am Kfz-Akku beim
Schweben gemessen. Alle Messungen wurden mit Kfz-Akku,
Trainingskabel und Trainingsgestell (Holzkreuz mit Styrokugeln =1200g)
ohne Flugakku sondern mit einem Äquivalenzgewicht (Zuladung)
durchgeführt (Motor K Speed Heli ).
18 A bei 160g Zuladung (8 Stück N500AR)
20 A bei 360g Zuladung (7 Stück RC2000)
Leider hatte das Meßgerät nur einen Meßbereich bis 20 A, so
daß ich keine zusätzlichen Untersuchungen durchführen konnte.
Ich werde mit zwei parallel geschalteten Meßwiderständen 0.01
Ohm (40 A) von Conrad weitere Meßreihen (Tabelle Stromaufnahme/Zusatzgewichte)
erstellen. 12 Zellen (SUB C) kann unser Hubi nicht/kaum tragen.
Weiterhin könnte es Probleme mit der Steuerung und dem BEC geben.
Mein EP Concept hatte ein
Abfluggewicht von 1700g (10 Zellen). Das ist natürlich viel zu
schwer
Folgende
Änderungen habe ich vorgenommen (Überschlagsrechnung):
| Vorhandene Baugruppe | Optimale Baugruppe | Einsparung |
| Roll S3003 35g | Micro Servo 20g | 15g z.B. robbe FS 500 MG |
| Nick S3003 35g | Micro Servo 20g | 15g z.B. robbe FS 500 MG |
| Heck S3003 35g | Micro Servo 20g | 15g z.B. Kyosho HS-85 |
| Pitch S3001 35g | Micro Servo 20g | 15g z.B. Kyosho HS-85 |
| Empfänger C16 35g | Micro Empfänger 15g | 20g |
| orig. Motor175g | anderer 125g | 50g |
| Kreisel 30g | Mini 20g | 10g |
| 10 Zellen 600g | 12LI-Ionen 600g ..700g | mehr Power, 12 Zellen 4,5Ah...5Ah |
| Trainingsgestell | ohne | 40g |
| Alu Heckrohr | Carbon Heckrohr | |
| Holzblätter | Carbonblätter |
Mein EP Concept hat derzeit ein
Abfluggewicht von ca. 1600g (10 Zellen 2400mAh)
Als weitere Optimierung sehe ich die Gas/Pitch Einstellung.
Ich werde eine Meßreihe mit verschiedenen Gas/Pitch Werten,
Stromaufnahmen und Rotorkopfdrehzahlen erstellen. Dabei versuche
ich, die Werte für die geringste Schwebestromaufnahme
herauszufinden.
Tabelle Kopfdrehzahl (K Speed 17)
| Zellen | 0° Pitch | 8° Pitch | 10° Pitch |
| 7 | 1500 | 1350 | 1200 |
| 8 | 1700 | 1550 | 1300 |
| 10 | 1950 | 1750 | 1500 |
Damit eine optimale Flugzeit erreicht werden kann, sollte die Drehzahl nicht zu hoch gewählt werden (lieber etwas mehr Pitch). Ich erreiche z.Z. ca. 1275...1300 Umdrehungen mit 10 Zellen BL40 12L und einem 13er Ritzel. Meinen Regler Schulze Future 45 ho verwende ich im Steller Mode und habe ihn fast voll aufgedreht (keine Gas/Pitch Mischung sondern auf einen Schalter oder Schieberegler legen).
Man sollte den Stecker vom Motor abziehen, den Akku anstecken
und nun bei dem am Boden stehenden Heli ständig
alle Servos in Bewegung halten (an allen Knüppeln rühren).Ich
habe diesen Test durchgeführt und bei mir fließt ein
durchschnittlicher Strom von ca. 1 A. Hierbei ist eine starke
Erwärmung der BEC des Reglers ab 10 Zellen (Kontronik CYBEC 40-6-12
mit Kühlkörper) festzustellen.
Die Blockierstromaufnahme meines Servos S3003 beträgt ca. 500 mA,
und im Betrieb werden ungefähr 100 mA verbraucht. Ein Kyosho HS81
benötigt 400 mA, ein Graupner C341 hat eine
Blockierstromaufnahme von ca. 600 mA . Ein S3101 kann da schon
noch mehr schlucken, ist dafür auch schneller. Deshalb Vorsicht
mit Digitalservos oder schnellen Analogservos, die ziehen noch
mehr Strom. Wenn man nun für 4 Servos und den Gyro die Spannung
bereitstellen will, sollten über 1.5 A Dauerlast und 3 A
Spitzenlast möglich sein.
Ich habe eine BEC Schaltung [12] mit dem LT
1084-5 CT (bis 5 A für 10...12 Zellen) aufgebaut, um die
Probleme mit den BEC Reglern (z.B. Kontronik 3SLB xx) zu umgehen.
Bei 10 Zellen und BEC mit Längsreglern sollte unbedingt ein
Kühlkörper verwendet und auf ausreichende Zirkulation geachtet
werden, da bis zu 21 Watt Verlustleistung abgeführt ("verbraten")
werden müssen. Abhilfe schaffen nur Schaltregler (mit getaktetem BEC), wie der Regler
von Lehner (4A) oder das externe BEC von Titus
Jäger.
Es können 500er Motoren verwendet werden, wie sie die Autofreaks verwenden.
| Name | Hersteller | Ritzel für 7...10 Zellen |
Bemerkungen |
| K Speed Heli | Kyosho | 16...13 | Original Motor 15 Wdg. |
| K Speed 17 | Kyosho | 16...13 | mit Lüfter |
| Pro Stock 19 9.6V | 16...13 | sehr preiswert | |
| GM9596 23Wdg. | GM-Racing | 18...16 | 10/1700mAh ca. 8 min Flugzeit |
| HP 200/25 | Plettenberg | 16...13 | Edel, 10/3000mAh ca. 10 min Flugzeit |
| allg. 500er 15...21Wdg | alle | 18...13 | Arbeitsdrehzahl 24000...30000 |
Regler mit BEC für 500er Motoren
| Name | Hersteller | Strom in A | Bemerkungen |
| Rondo 600 | Kontronik | 18 (22) | direkt montiert, sehr leicht |
| CyBEC
40-6-12 StarBEC 50-6-12 |
Kontronik | 40 50 |
Unterspannungsabschaltung(on/off), verpolungssicher |
| allg. Regler mit BEC | alle | >25 | sollte klein, leicht, robust sein (BEC!) |
Bürstenlose Motoren
| Name | Hersteller | Ritzel für 7...10 Zellen |
Bemerkungen |
| X250-4 | Ikarus | Welle=5mm | |
| X250-5 H | Ikarus | ||
| 1525 16 Wdg. | Lehner | 14...18 | Stern / Dreieck Umschaltung |
| BL 400/29 | Kontronik | 16...18 | 120 g |
| BL 480/33 | Kontronik | 14...13 | 150 g |
| HBR B40 S 16 Wdg. | Hacker | 16...18 | 120 g |
| HBR B40 L 12 Wdg. | Hacker | 16...18 | 150 g |
| allg. Motor brushless | alle | 18...13 | Arbeitsdrehzahl 24000...30000 |
Regler mit BEC für bürstenlose Motoren
| Name | Hersteller | Strom in A | Bemerkungen |
| V45 35A/45A | Ikarus | 35 (45) | mit Sensor |
| 1830 | Lehner | 30 | |
| Future-45Ho | Schulze | 45 | ohne BEC, 10% mehr Drehzahl |
| 3SLB 25-6-12 3SLB 40-6-12 3 SL 40-6-12 |
Kontronik |
25 40 40 |
Drehzahlreglung im Heli Mode, Unterspannungsabschaltung(on/off) ohne BEC |
| allg. Regler mit BEC | alle | >25 | sollte klein, leicht, robust sein (BEC!) |
Blau gekennzeichnet ist meine alte
Ausstattung
Grün gekennzeichnet sind günstige
Ausstattungen
Grün gekennzeichnet ist meine
aktuelle Ausstattung
Damit die Anpassung an verschiedene Motoren und Zellenzahlen
erfolgen kann, sind verschiedene Ritzel notwendig.
Die Ritzel von Kyosho haben Modul 0.8 (32dp), das weitere
Getriebe soll aber Modul 0.75 (34dp) (siehe [2]
und [3]) besitzen.
Von Firma Lennecom GmbH [10] wird ein passendes Ritzel (Modul 0.75) mit 13 Zähnen (Gesamtübersetzung 20:1) angeboten.
Anpassungen am Chassis:
Als Motorplatte (EH-99) sollte man sich mit Alublech, Sperrholz
oder Leiterplattenmaterial (1.5mm Epoxyd) einen neuen
Motorträger herstellen, oder sich mittels Pappe zumindest eine
Schablone vom Originalteil fertigen. Nun werden die Langlöcher
mit einer Schlüsselfeile o.ä. verlängert und die Aussparungen
der Plastedeckplatte EH-98 vergrößert (Verstellbereich
vergrößern). In die Grundplatte EH-32 werden zwei Löcher (5mm
oder Langlöcher) zum Verstellen der Motorhalteschrauben gebohrt.
Zusätzlich ist noch ein weiteres Loch (10mm) anzubringen, um das
Zahnflankenspiel im zusammengebauten Zustand einstellen zu
können. Durch diese neuen Öffnungen kann später das Spiel
überprüft und das Getriebe gefettet werden. Wenn alles
eingestellt ist, kann man diese Öffnungen mit Klebeband
verschließen, so daß das Getriebe weiterhin vor Schmutz
geschützt wird. Die neue Mortorträgerplatte aus 1.5mm Epoxyd
und die zusätzlichen Öffnungen tragen zur Gewichtsreduktion bei
[2].
Ich habe mir einen zusätzlichen Kühlkörper für den Motor (bei
Conrad 24DM) zugelegt. Dieser ist besonders geeignet, wenn man
mit einem Kfz- Akku trainiert. Man kann aber auch selber einen
Kühlkörper aus Schlauchschellen (oder Dosenblech) und kleinen
Alublechen basteln. Dabei dürfen die Lüftungslöcher am
Motorgehäuse nicht verschlossen werden. Durch die zusätzliche
Wirkung als Statorring wird der Stromverbrauch etwas verringert.
Weiterhin kann man die Oberfläche des Motorgehäuses/Kühlkörpers
aufrauhen (Oberfläche vergrößern). Außerdem sollten in der
Kabinenhaube zusätzliche Luftöffnungen geschaffen werden.
Zum Kühlen (Entladen) der Akkus und des Motors in der Flugpause
verwende ich einen PC- Lüfter.
Mit zwei Kugellagern d=7mm und einer zusätzlichen
Hauptrotorwelle kann man die Lager in einen Schraubstock
einspannen (oder eine selbst gebaute Spannvorrichtung verwenden)
und somit den gesamten Rotorkopf (erst ohne Rotorblätter [nur
Kopf + Paddelstangen], dann mit bereits mittels Rotorblattwaage
ausgewuchteten Rotorblättern) auswuchten. Zusätzlich kann man
diese Spannvorrichtung zum Messen der Unwucht (mit Meßuhr) der
Hauptrotorwelle verwenden (z.B. nach einem Crash).
Damit ich nicht immer zwischen L/S für Simulator und Flugbetrieb
das Kabel in der mc-16 umstecken muß, um das HF Teil zu
deaktivieren, habe ich mir die in [4]
vorgestellte Schaltung aufgebaut und bin damit sehr zufrieden.
Mit dieser Schaltung kann ein Empfänger an den Joystick Port des
PCs angeschlossen werden. Der Simulator (und auch andere
Programme) werden dann wie mit einem 4 Kanal Joystick bedient.
Außerdem habe ich mir eine Lichtschranke gebastelt, damit ich
mit meinem Multimeter (Frequenzmesser) die Rotordrehzahl
ermitteln kann.
Als Ladegerät verwende ich ein Infinity 2 von robbe. Zusätzlich
habe ich mir einen Kfz- Akku und ein stationäres Netzteil 13.8V
10A zugelegt. Für diesen Lader habe ich ein Kabel zum Anschluß
an den PC [5] gelötet. Weiterhin habe ich
noch eine Software für Windows
programmiert, mit der ich die Daten meiner Akku-Packs speichern
und vergleichen kann.
Zum Selbstlöten von Inline-Packs benötigt man einiges an Material und Zubehör:
Preisgünstige Inline-Packs und Zubehör zum Selbstlöten
findet man unter www.batt-mann.de.
Zuerst werden die Lötflächen mit etwas Sandpapier aufgerauht
und dünn (!!!) verzinnt. Danach legt man beide
Zellen in eine V-Schiene (ich nehme ein altes Schubfach zwischen
die Beine), erwärmt sie gleichzeitig, nimmt die Hammerlötspitze
raus und schiebt sie (möglichst schnell) zusammen. Nun führt
man mit einem leicht feuchten Lappen die Wärme etwas ab. Am
Anfang kann man sich auch von einer weiteren Person helfen lassen,
denn beim Löten fehlt oft eine dritte Hand.
Hier noch ein weiterer Tip von mir. Ich entferne von den Zellen
alle Werbeaufschriften (Schrumpfschlauch oder Papphülsen), diese
können unter Umständen sehr dick sein -> schlechte
Wärmeableitung! Zwischen den Zellen verwende ich
Isolierplättchen, die ich mit einem Tropfen Sekundenkleber
festklebe. Die komplette "silberne Stange" wird dann
mit Schrumpfschlauch 38 mm ummantelt. Das sorgt für die
elektrische Isolation zwischen mehreren Inline-Stangen und
schafft zusätzliche Stabilität. Mehrere Inline-Stangen werden
mit Kupferstreifen oder besser mit Zellenquerverbindern verlötet.
Für sehr lange Inline-Stangen sollte man zusätzlich ein
Streifen- ,T- oder Winkelprofil mit Einschrumpfen, um die
mechanische Stabilität zu erhöhen.
Ich messe jede Zelle mit meinem Ladegerät (Infinity 2 kann 1 bis
30 Zellen) vorher aus, und stelle entsprechende Akkupacks
zusammen, die im entladenen Zustand zusammengelötet werden.
Anschließend werden mehrere (3...5) Lade/Entlade Zyklen (das
kann mein Infinity auch) mit geringem Strom (250...500 mA) und
relativ hoher Entladeendabschaltspannung (1.0 bis 0.9 V pro Zelle)
durchgeführt. Dabei überwache ich alle Vorgänge mit dem PC.
Bei leicht unterschiedlichen Zellen ist nicht der Ladevorgang,
sondern der Entladevorgang von entscheidender Bedeutungt. Wenn
beim Laden eine Zelle schneller voll ist als eine andere, wandelt
sie die überschüssige Energie in Wärme um. Bei geringen
Ladeströmen ist das nicht so schlimm. Beim Entladen wird die
Zelle, welche die geringste Kapazität hat und auf NULL entladen
wurde sozusagen umgepolt-> ACHTUNG!!! das führt zur
Zerstörung der Zelle. Deshalb sollte die
Entladeendabschaltspannung am Anfang relativ hoch gewählt werden.
Durch den Memory Effekt gewöhnen sich die Akkus aneinander.
Bisher von mir benötigte Ersatzteile
Tunigteile
Zubehörteile
Erweiterung der Fernsteuerung (mc-16)
Werkzeuge und Hilfsmittel
Hilfsstoffe
| Typ Rumpf | Blätter | Servo | Regler | Motor | Ritzel | Gyro | Empf. | Sender | Akku | Time | Masse | |
| EP Concept SR Trainer |
EH-15 EH-83 GFK Ulm JRC |
3 x S 3003 1 x S 3001 2x FS
500 MG |
Kontronik CyBEC 40-6-12
|
Kyosho K Speed17 Kyosho K Speed Heli
|
16 13 13 |
Ikarus Mini |
Graupner C16 Graupner R600 |
Graupner mc-16 |
8/1800 Panasonic
|
4 min 6 min
|
1550g 1700 g 1600g |
Joerg.Reinholdt@t-online.de |
| EP Concept SR Trainer |
EH-83 GFK Ulm |
4 x C 3041 | Kyosho | Kyosho K Speed Heli Pletti HP 220/25/5 |
16 13 |
Hitec GY 130 Robbe 3D |
Multiplex Piko 4/5 oder Mikro 7 | Multiplex Cocpit MM |
8/ 3000 GMVIS 10/2000 Sanyo |
1400 g | werner@zeus.landw.uni-halle.de | |
| EP Concept SR | EH-15 | 2 x Volz Micro Star 2 x Robbe RS 650 |
LRP Heli-Star | GM Racing 19 Wdg. | 16 | ACT Mini (7g) |
Graupner C12 | Graupner X388 S | 8/2000 Sanyo | 6 min | Juergen.Stangenberg@t-online.de | |
| EP Concept SR Hughes 300 |
EH-15 | 4 x Hitec HS-300 | Robbe MC114H | Kyosho K Speed Heli | 13 | Ikarus Mini |
Graupner C12 | Graupner mc-14 |
8/2000 | 5 min | bernd.schnuecker@debitel.net | |
| EP Concept SR HUGHES 500 |
EH-15 | HELI6-10-40BEC | GM-EVOII 23Wdg | 16 | Ikarus Mini |
RX2000DC | Futaba FC-18 |
10/1700 Sanyo Rot |
10:57 min | 1440g | stefan.kneller@rtl.de | |
| EP Concept | EH-15 | 4 x C507 | Kontronik 3SLB 25 |
Lehner 19/20/10 in Stern | EH-63 | Simprop Mini |
10/2000 Sanyo 14.4V Li-Ionen |
10 min über 30 min |
KSchasse@LenneCom.de | |||
| EP Concept | EH-15 | 4 x C341 | Heli MOS 25 | 16 | Graupner Mini Gyro |
Graupner C19 | Holger.Zuhmann@langnese-iglo.de | |||||
| EP Concept | EH-15 | 3 x c341 1x HS-81(Heck) |
Kontronik Regler | Kyosho Le Mans AP-BB | Graupner Mini Gyro |
Futaba FP R-116FB | Futaba FC-16 |
8/17000 | 4:30 min | 1400g | zdaniel@gmx.de | |
| EP Concept | EH-15 | 4 x S3003 | FP- R118B | Futaba FC-18 |
7/3000 Orion | 6 min | schibli@netwings.ch | |||||
| EP Concept | EH-15 | 4 x Hitec HS-300 | Graupner PICO MOS 56 mc |
Kyosho K Speed Heli | 16 | Simprop SPG-05 |
Graupner C17 | Graupner mc-14 |
Thang.Nguyen-Xuan@detewe.de | |||
| EP Concept Hughes300 (JetRanger) |
EH-15 M-Blade ECO8 |
4 x Hitec HS425BB | Kontronik StarBec 40-6-12 Schulze Future 45he |
Kyosho K Speed Heli hb20-12 in Dreieck |
14 13 |
ACT Micro | Graupner C17 | MC24 / X-3810 | 8/2000 GiGaPower | 4:30 ???? |
1500g | Joerg@Rautenstrauch.de |

Bei der Dimensionierung habe ich auf meine Erfahrungen, die
ich mit meinem EP Concept gesammelt habe und die Kenntnisse
meines Kollegen Michael, der einen LMH 110 besitzt,
zurückgegriffen. Zusätzlich habe ich in einer Tabelle die
Ausstattung von verschiedenen Helipiloten gesammelt, da es sehr
hilfreich sein kann, bei der Auswahl von Komponenten (Servos,
Empfänger, Motor ....) auf Wissen anderer Modellbauer
zurückzugreifen.
Um lange Flugzeiten zu erreichen, muß es natürlich ein
Bürstenloser sein. Weiterhin stellte ich mir die Vorgabe, mit 10
Zellen zu fliegen, damit ich den Akku vom LMH auch im EP
einsetzen kann und umgekehrt und so erst mal kein neuer Flugakku
angeschafft werden muß. Somit viel meine Wahl auf das Kontronik
Drive 150 Set (mit Motor Fun 400-23 und Regler Smile 30-6-12 zum
Preis von ca. 230 nicht zu schlagen).
Meine ersten Flugversuche haben in der Praxis bestätigt, daß
der LMH 120 Corona mit dem Kontronik Drive 150 Set und 10 SUB-C
Zellen (mit 10xSanyo 2400 schwebt mein LMH ca. 11 Minuten!)
betrieben werden kann.
Am 21.04.2002 habe ich folg. Schwebeflugzeiten mit einem
Abfluggewicht von knapp 1300g (Heli ohne Haube 726g + Akku 560g)erreicht:

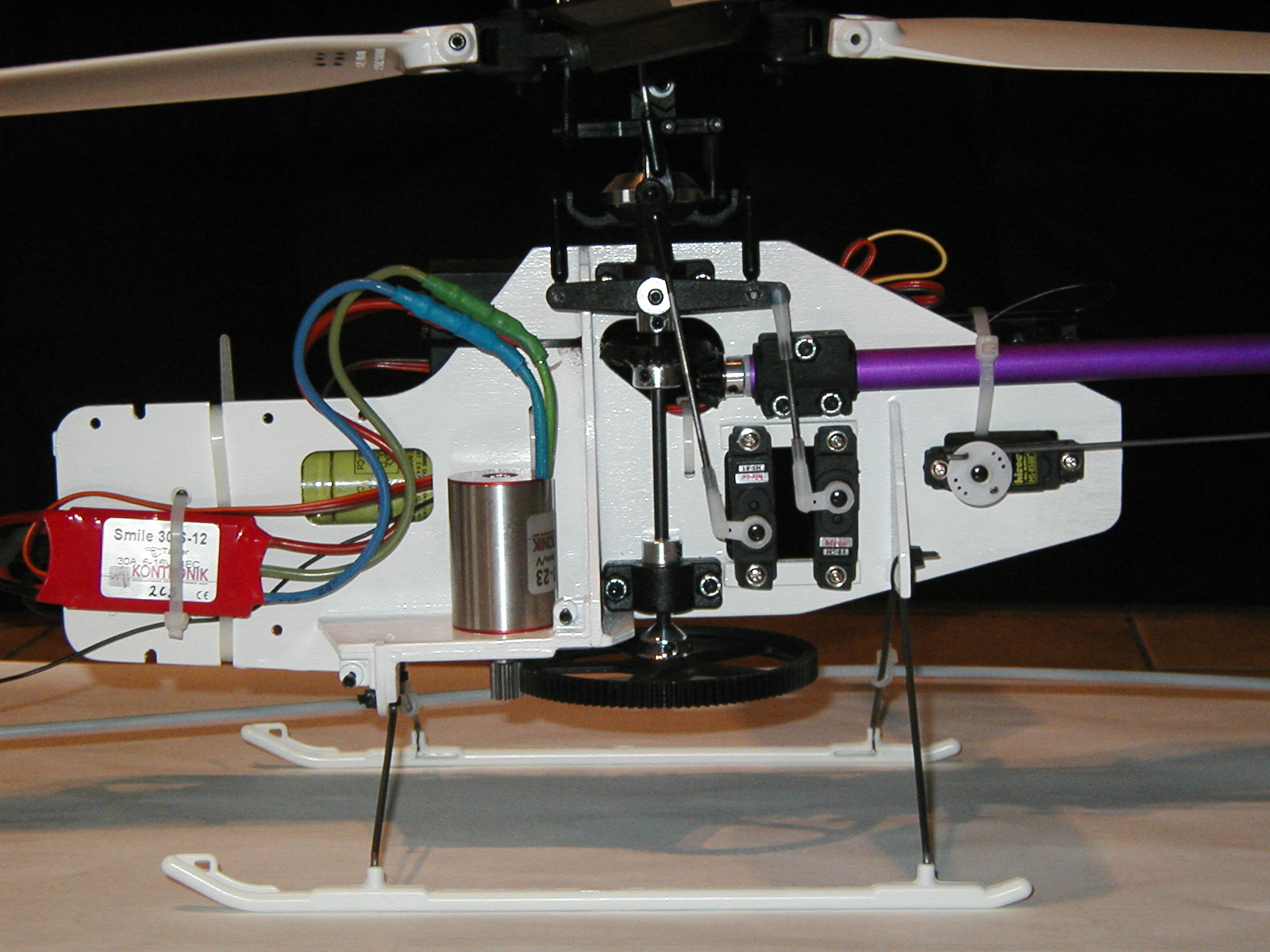
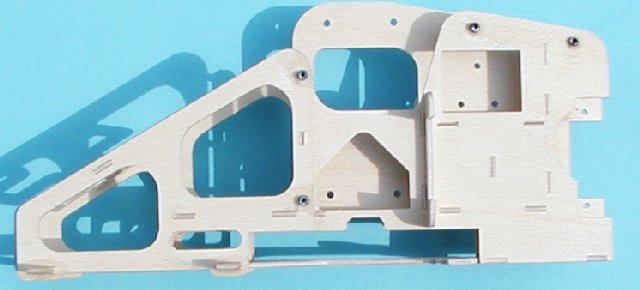
Ich habe von meinem Modellbaukollegen Dietmar Hackenberg (hackenberg@mail.isis.de),
den ich durch Mailkontak kennen gelernt habe, ein von ihm
entworfenes und hergestelltes Chassis erhalten. Die gefrästen
Sperrholzteile besitzen eine ausgezeichnete Qualität, alle Teile
sind passgenau und es waren keine Nacharbeiten notwendig. Die
ganze Konstruktion macht einen sehr durchdachten Eindruck.
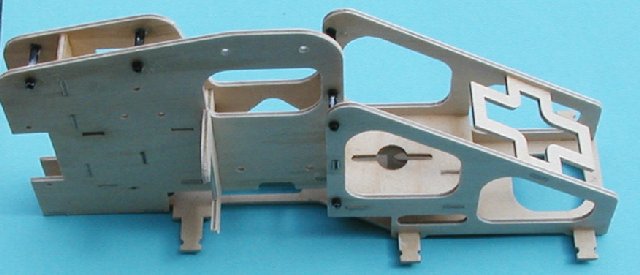
Für den Umbau sind HS-81 Servos und eine gekürzte Rotorwelle,
wie sie z.B. von rc-city geliefert wird, vorgesehen. An dem
Chassis kann das originale Kufenlandegestell oder edle CFK
Kufenbügel sehr gut befestigen. Bei dieser Aufbauvariante lassen
sich alle Fernsteuerbaugruppen, Motor und Regler sehr günstig
platzieren, so daß nur kurze Leitungslängen benötigt werden.
Den größten Vorteil sehe ich in der Unterbringung des Akkus,
der nun unterhalb des Haupzahnrades liegt. Das ist günstig für
den Schwerpunkt und der Flugakku kann sehr schnell ausgetauscht
werden, ohne daß die Haube entfernt werden muß.
Mit dem neuen Chassis können problemlos 10 SUB-C Zellen (2000
mAh oder 2400 mAh) verwendet werden. Durch das relativ hohe
Akkugewicht und die tiefe Schweerpunktlage wird der LMH-120 recht
eigenstabil (anfängerfreundlich!) und kann auch bei böigen
Windverhältnissen geflogen werden. Mit den 10 leichteren Zellen
(1225 mAh) ist er sehr dynamisch unterwegs. Die Schwebeflugzeit
beträgt je nach Akku zwischen 8 bis knapp 11 Minuten. Die
Erwärmung der Motors ist gering (ca. 45° nach 10 Minuten
Flugzeit bei 20° Umgebung). Das beweist die gute Abstimmung des
Antriebes und weist auf einen guten Wirkungsgrad hin.
Eine Erwärmung des Reglers konnte ich nicht feststellen (nur
handwarm). Zur Sicherheit verwendete ich anfangs eine
zusätzliche BEC Stromversorgung. Einige Tests (10 min volle
Ausschläge aller Servos -> mittlerer Strom < 1A) der
internen BEC-Schaltung des Regler haben ergeben, dass auch diese
verwendet werden kann. So nutze ich jetzt das interne BEC meines
Regler.
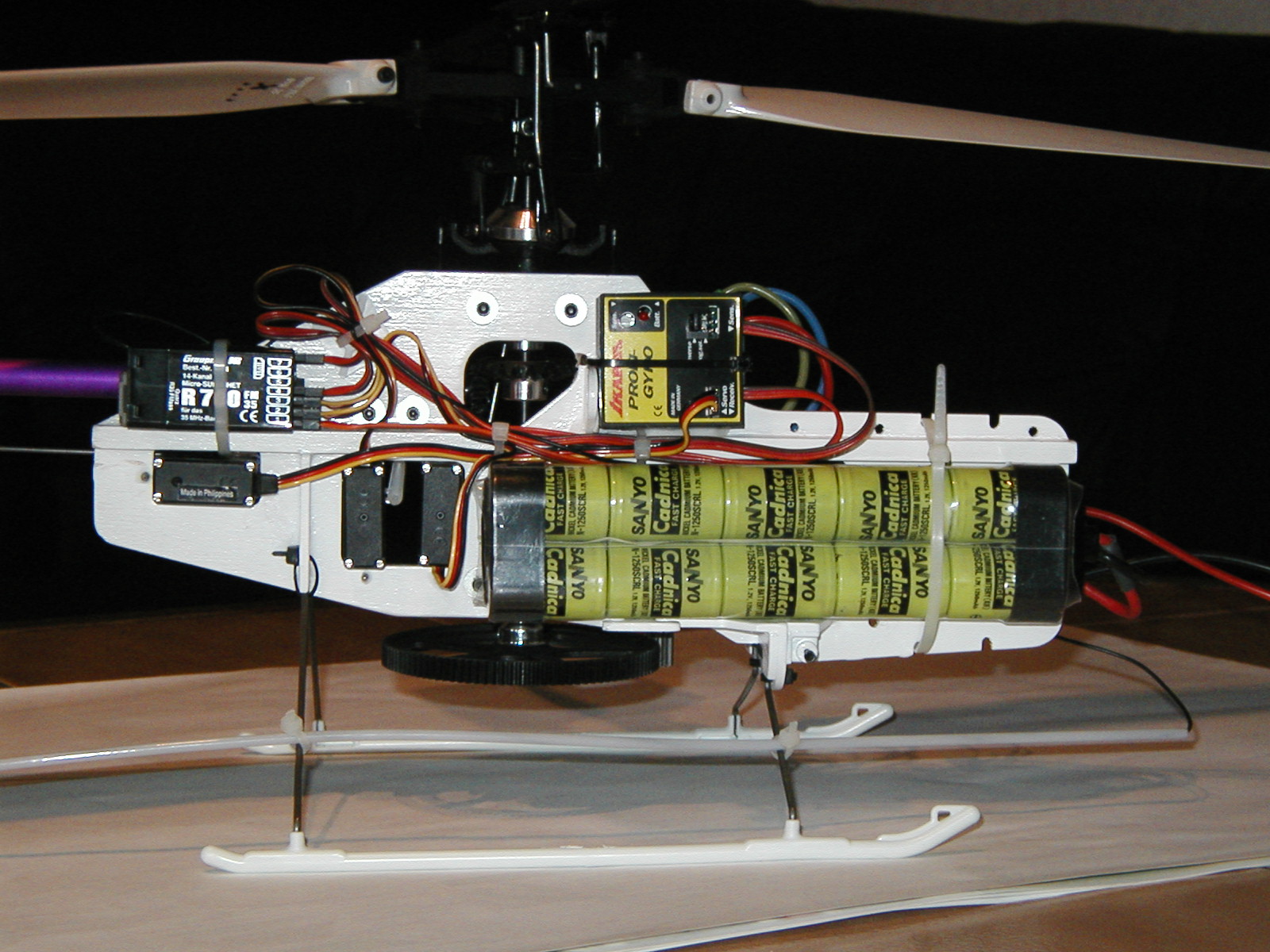
Mit dem verwendetem Ikarus Profi Gyro bin ich sehr zufrieden. In
beiden Betriebsmodi (Heading Hold und Normal) arbeitet er sehr
zuverlässig und eine Temeraturdrift konnte ich nicht feststellen.
Die Einstellung ist sehr einfach über einen zusätzlichen
Fernsteuerkanal (so verwende ich es mit dem R700 von Graupner)
oder mittels Jumper vornehmbar. Ab jetzt verwende ich auch in
meinem EP Concept diesen Gyro. Der bis dahin verwendete Ikarus
Mini Gyro ist im Vergleich zum Profi Gyro totaler Mist!
Das Gewicht meines 120er beträgt 728 g (ohne Haube). Der Akku (10
x 2400 Sanyo) wiegt 620g oder der kleine Akku (10x1225 Sanyo)
wiegt 460g.



| Typ Rumpf | Blätter | Servo | Regler | Motor | Ritzel | Gyro | Empf. | Sender | Akku | Time | Masse | ||
| LMH-110 | LMH-110 / 5° | 3 x HS-81 | Kontronik 3SLB 25-6-12 | Kontronik BL400-29 | 10 | Ikarus Mini | ACT Micro-6 | MULTIPLEX 3010 | 8 x KR-1400AE Sanyo | 7min30sec | 981g | http://home.t-online.de/home/hGraepel | |
| LMH-110 | LMH-110 / 4° | 3 x FS 500 MG Robbe | Kontronik 3SL 30-6-12 | Kontronik BL400-36 | 11 | Ikarus Mini | Pico 4/5 | Robbe FX-14 | 7 x RC2400 8 x 1250 SCR |
8min20sec 3min30sec |
gert@greenie.muc.de | ||
| LMH-110 | LMH-110 | 2 x HS-81 1 x HS-81 MG |
Schulze future 20 Le | Hacker HBR B40 11S | 10 | robbe G-200 | ACT Micro-7 DSQ | 6 x 2400 | Heli@schepmann.de | ||||
| LMH-120 | LMH-120 / 4-5° | 2 x HS-81 1 x HS-81MG |
Kontronik Smile 30-6-12 | Hacker HBR C40 14S | 9-10 | Ikarus Mini | Ikarus Mini-6 | Graupner/JR X-3810 ADT | 8 x 2400 Sanyo | 10min | volker@rc-city.de | ||
| LMH-110 | LMH-110 | 2 x C341 Graupner 1 x ... |
Kontronik 3SLB 25-6-12 | Kontronik BL400-22 | 12 | robbe G200 | ACT | 8 x 1900 Sanyo | 8-9min | Martin.Muennich@t-online.de | |||
| LMH-110 Holz / CFK |
LMH-110 / 4° | 2x Mini 1 x DS 3781 Graupner |
GM Brushles | GM 13 Turn ( 3200 umin/V) | 9 | Simprop | Graupner C12 | Graupner MC-20 | 8 x GP3300 | 10min | RCBENDER@aol.com | ||
| LMH 120 Kyosho Haube |
LMH-120 / 4° | 3 x HS-81 | Kontronik 3SLB 25-6-12 | Kontronik BL400-29 | 9 | mini-Gyro MS-Composite | ACT Micro-6 | Hitec Flash 5 X | 8 x GP3000NiMh | 15min30 | thmarx@lycos.co.uk | ||
| LMH-120 Corona | LMH-120 / 4° | 2 x HS-81MG 1 x HS-81 |
Kontronik Smile 30-6-12 | Hacker HBR C40 14S | 9 | ACT Micro | ACT Micro-6 | x3810 | 8 x RC2400 | 10-11min | j.rautenstrauch@gmx.de | ||
| LMH120 SlimFat Chassis Hughes500 |
LMH-120 / 5° | 3 x FS 500 MG Robbe | Kontronik Smile 40-6-12 | Hacker HBR C40 9S | 10 | MSMCGYRO EL Mc Gyro | Graupner C17 | Graupner MC-15 | 8 x1700 Sanyo | 8,5-9,0 min | 1334g ohne Rumpf |
jack08@gmx.net | |
| LMH-110 | LMH-110 / 5° | Kontronik Smile 30-6-12 | Kontronik Fun 400-28 | 10 | 8-10 x 1250 SCR | e9625624@stud3.tuwien.ac.at | |||||||
| LMH-110 | 3 x HS-81 MG | Kontronik 3SLB 25-6-12 | Kontronik Fun 400-36 | 10 | Ikarus Mini | ACT Micro-6 | Multiplex MC3010 | 7 x CP1300SCR Sanyo 7 x KR1800SCE Sanyo 7 x RC2000 Sanyo 8 x N1250SCR Sanyo |
5min30sec 7min 8min |
Jochen.Schoenefeld@t-online.de | |||
| LMH-110 | LMH-110 / 5° | 3 x HS-81 MG | Kontronik Smile 30-6-12 | Hacker HBR B40 14S | 10 | Simpro SPG-05 | Webra Nano S6 | Multiplex MC4000 | 7min30sec | hackenberg@mail.isis.de | |||
| LMH-110 | Purple Bull | 10 | ACT Micro | 6-7min | haraldkuehnlein@freenet.de | ||||||||
| LMH-110 | LMH-110 / 5° | 3 x HS-81 | Kontronik 3SLB 25-6-12 | Lehner 1515 / 19 | 8 | ACT Micro | Futaba R 115 | Futaba FC-18 | 12 x KR-1400AE Sanyo | 8-9min | 1130g | m-vdh@web.de | |
| LMH-120 (Umbau) Lexalu HUGLES 500 |
LMH-120 | 3 x HS-81 MG | Kontronik Smile 30-6-12 | Hacker | sally@nefkom.net | ||||||||
| LMH-120 | LMH-120 / 4° | 2 x HS-81 1 x HS-85 |
Kontronik (+ext..BEC) Smile30-6-12 oder Beat 40-4-12 |
Kontronik Fun 400-23 | 9 | Ikarus Profi | Graupner R 700 | Graupner mc-16 | 10 x Sanyo CP 1600 SCR | Joerg.Reinholdt@t-online.de | |||
Die ROT dargestellten Spalten sind meine Wunschausstattung!
http://www.flyheli.de/ (Kurt, vielen Dank für Deine Seiten und Deine Hilfe!)
http://www.flyheli.de/el_switch.htm
http://www.muc.de/~winklt/german/lessons/
http://spnova.cs.ehime-u.ac.jp/~shimizu/dokidoki/index/eprcE.html [1]
http://www.venus.dti.ne.jp/~furui/indexe.html
http://home.t-online.de/home/C_Jhm/rcfspic.htm [4]
http://home.t-online.de/home/michael.rackow/ [6]
http://www02.so-net.ne.jp/~p-bear/epcone.html
http://www.dokidoki.ne.jp/home2/junkos/
http://www.dokidoki.ne.jp/home2/junkos/heli-1/concept01.html
http://member.nifty.ne.jp/~ikeuchi/
http://www3.big.or.jp/~tkst/heli/84epcon.htm
http://www3.big.or.jp/~tkst/heli/ep1.htm
de.rec.modelle.misc
z-netz.alt.modellbau
http://cmc-versand.einkaufsfuehrer.de/auswahl.phtml?fkatid=6128&abteilunstex
Fa. Fleischmann Tel. 02722-938011 Fax 02722 / 938026 [7]
JV-Modellbau Ulm Tel. 0731 / 263805 [8]
Lennecom GmbH Tel. 02331 / 955922 [10] Knut Schasse mobil 0173 / 9590522
Foto-Hobby-Paasch@freenet.de [11]
http://www.modelsport.cz/MS_Composite/Main_Rotor_Blades/main_rotor_blades.html [9]
http://www.carbon-vertrieb.de/
Rotor 1/1999 [2]
Rotor 4/2000 [3]
![]()